Обзор оборудования
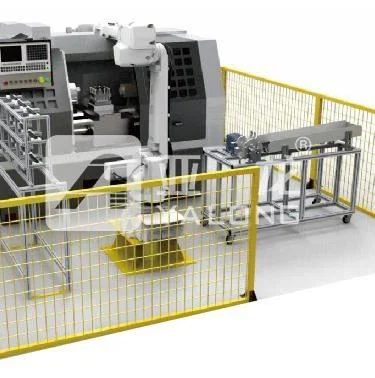
Промышленная роботизированная совместная рабочая станция представляет собой комплект учебно-тренировочных устройств для перемещения, сборки и проверки готовой продукции с помощью роботов. Данная совместная рабочая станция в основном выполняет сборку редуктора и проверку собранного редуктора. Процесс заключается в том, что транспортирующий блок подает детали в зону обнаружения блока визуального контроля, датчик зрения определяет ориентацию детали, робот корректирует ориентацию детали в соответствии с данными, полученными от датчика зрения, затем два робота работают совместно, чтобы собрать деталь на сборочной платформе. После установки редуктора он перемещается на испытательную платформу для проверки и регулировки скорости собранного редуктора.
Данная совместная рабочая станция в основном состоит из транспортирующего блока, блока визуального контроля, блока совместной сборки с роботами и блока проверки готовой продукции.
Особенности
2.1 Многофункциональный захват робота
На этой рабочей станции имеются два захвата робота с разными функциональными характеристиками, и захват в основном состоит из пневматических цилиндров. Каждый захват может выполнять различные функции и может захватывать детали разных规格 (размеров) и разных типов.
2.2 Линейная транспортировка
Использование промышленного линейного транспортирующего механизма, ленточная транспортировка широко применяется для перемещения твердых промышленных объектов. Она характеризуется непрерывной и равномерной транспортировкой, высокой производительностью, стабильной работой, низким энергопотреблением, низкими эксплуатационными расходами, а также удобством обслуживания и ремонта.
2.3 Совместная работа двух роботов
Два промышленных робота представляют собой не только единое целое, но и две независимые системы. Единое целое в основном отражается в тесном сотрудничестве двух роботов, скоординированной работе и точной сборке редуктора; две независимые системы показывают, что оба робота могут самостоятельно выполнять учебные операции и изучать программирование.
2.4 Возможность проверки собранного редуктора
Основная часть редуктора изготовлена из прозрачного материала, что позволяет студентам не только наглядно наблюдать и понимать структуру редуктора, но и проводить онлайн-отладку и измерения готового редуктора.
Питание: однофазное трехпроводное AC220V±5% 50 Гц
Защита безопасности: защита от утечки тока (ток срабатывания ≤30 мА), защита от перегрузки по току, защита плавкими предохранителями
Номинальная мощность: ≤2 кВт
Температура окружающей среды: -10°C ~ 40°C
Относительная влажность: ≤85%
Размер рабочего стола: 1500 мм (длина) × 1200 мм (ширина) × 1400 мм (высота)
Структура изделия
Транспортирующий блок
Этот блок в основном имеет два транспортирующих механизма, и поддон с материалом может перемещаться по двум транспортным линиям с помощью пневматического захвата, установленного на транспортной линии.
Блок визуального контроля
Основная часть этого блока — система технического зрения.
Система технического зрения — это система, которая позволяет роботу иметь функции визуального восприятия и является одной из важных частей роботизированной системы. Система технического зрения может получать двумерное изображение окружающей среды через датчик зрения, анализировать и интерпретировать его через процессор зрения, а затем преобразовывать в символ, позволяя роботу распознавать объект и определять его местоположение.
На этой рабочей станции, когда транспортирующий блок подает детали в зону обнаружения датчика зрения, датчик зрения передает роботу тип детали, ее расположение и координаты, обеспечивая точность и целенаправленность захвата деталей роботом.
Блок совместной сборки с роботами
Этот блок в основном состоит из двух промышленных роботов и двух наборов прецизионных захватов для роботов.
Каждый захват робота оснащен различными пневматическими компонентами, что позволяет захватывать разные детали и обеспечивает сборку нескольких деталей разных размеров с помощью этих захватов.
Два робота взаимодействуют друг с другом, могут осуществлять обмен сигналами. Для обеспечения скоординированности и стабильности действий двух роботов исключается одновременное появление двух роботов в одном пространстве в процессе совместной сборки, что предотвращает столкновение роботов. В процессе сборки два робота сотрудничают друг с другом. Например, один робот может точно и стабильно передавать детали другому захвату робота после зажима, что значительно повышает гибкость роботизированной сборки.
Блок проверки готовой продукции
Этот блок в основном предназначен для испытания редуктора, собранного роботом. Редуктор изготовлен из цельного прозрачного материала, что не только улучшает эстетику, но и облегчает студентам изучение принципа работы редуктора.
Блок проверки готовой продукции оснащен системой движения, что позволяет студентам проводить испытания и отладку собранного редуктора в сочетании с системой движения.
Система электрического управления
Промышленная роботизированная совместная рабочая станция имеет электромеханическую разнесенную конструкцию и оснащена независимым шкафом электрического управления.