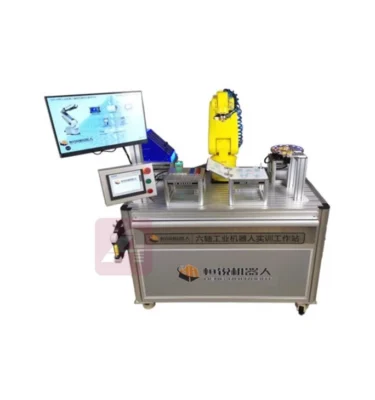
Учебное оборудование для промышленной роботизированной сварки YL-1627A (с однопозиционным позиционером) (далее именуемое YL-1627A) в основном состоит из сварочного робота, сварочной системы, позиционера, устройства очистки горелки, опорной плиты, системы безопасности, электрической системы управления и зажима для заготовок. Позволяет проводить обучение и практическую реализацию по настройке системы, отладке и вторичной разработке. В то же время оно может использоваться для обучения сварке и обработки различных заготовок, а также для вторичной разработки или улучшения зажима в зависимости от объекта сварки.
Учебное содержание
Установка и отладка аппаратного обеспечения:
- Технология установки и отладки основания промышленного робота
- Технология установки и отладки промышленного робота
- Технология установки и отладки зажима промышленного робота
- Технология установки и отладки сварочной системы промышленного робота
- Технология установки и отладки механизма подачи проволоки промышленного робота
Электрический монтаж и отладка:
- Технология электрического подключения и отладки между промышленным роботом и контроллером
- Технология электрического подключения и отладки между промышленным роботом и шкафом управления
- Технология электрического подключения и отладки между промышленным роботом и зажимом робота
- Технология электрического подключения и отладки между промышленным роботом и сварочной системой
- Технология электрического подключения и отладки между промышленным роботом и контроллером подающего механизма
Отладка программ и применение:
- Установка программного обеспечения для программирования и отладки промышленного робота
- Отладка процесса работы промышленного робота с помощью пульта обучения
- Отладка процесса работы промышленного робота через компьютерное программное обеспечение
- Управление процессом работы промышленного робота через плату ввода-вывода I/O
- Создание и применение базы данных управления роботом
- Сборка и эксплуатация промышленных роботов
- Сборка и эксплуатация промышленных роботов (повтор строки в оригинале, переведено как есть)
- Выполнение плоских траекторных движений промышленного робота
- Программирование и проектирование ПЛК
- Конфигурирование графических интерфейсов человеко-машинного интерфейса
- Коммуникационное управление между человеко-машинным интерфейсом и ПЛК