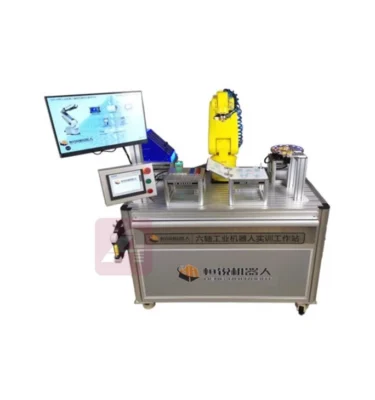
Учебно-тренировочный комплекс по программированию промышленных роботов YL-18 выполнен в модульном исполнении и может быть скомбинирован для трёхуровневого проектного обучения — начального, среднего и продвинутого, которые последовательно усложняются, причём высокий уровень охватывает навыки низовых уровней. Пользователи могут проводить базовые оценочные тренинги с использованием одного настольного приложения либо с помощью сращивания двух столов для достижения совместных тренировок и оценки двух роботов. Система объединяет технологию промышленных роботов, технологию механических передач, электронную и электротехническую технологии, различные эксплуатационные технологии, технологии интеллектуального восприятия, технологию программируемого управления, технологию машинного зрения, компьютерные технологии, технологию последовательной связи, технологию Ethernet-связи и другие передовые производственные технологии, охватывая профессиональные знания в области промышленных роботов, механического проектирования, электрической автоматики, интеллектуального восприятия, интеллектуального производства и других дисциплин. При этом центр идентификации оснащён информационным учебно-оценочным оборудованием, таким как камеры видеонаблюдения, электронные информационные панели, оборудование для верификации идентификационных данных, мультимедийное учебное оборудование, оценочная система Yalong и т.д., что позволяет создать современную информационную экзаменационную площадку и демонстрационный центр проведения оценочных испытаний.

Учебно-тренировочный комплекс по программированию промышленных роботов
1,00 Br
Передовое модульное построение промышленного робота:
Платформа использует промышленного робота в качестве ядра и оснащена множеством функциональных модулей. Это позволяет обучать различным сценариям применения промышленных роботов. Все модули спроектированы в соответствии со стандартными электрическими и механическими интерфейсами, поэтому модули, соответствующие спецификациям интерфейсов, могут использоваться на платформе, быть быстро заменены, взаимозаменяемы и свободно комбинироваться.
Тесная интеграция обучения с промышленным применением:
Платформа объединяет систему управления промышленным роботом, сервоприводную систему, газогидравлическую систему передачи, систему машинного зрения в сочетании с цифровыми и аналоговыми технологиями управления процессами, технологией RFID, технологией визуального контроля, офлайн-моделированием, технологией последовательной связи, технологией Ethernet-связи, шинной связью и т.д., чтобы полностью продемонстрировать применение промышленных роботов в интеллектуальном производстве. Это позволяет пользователям быстро освоить навыки применения промышленных роботов на реальных промышленных площадках.
Высокая безопасность и высокая надёжность:
Для разных категорий обучающихся программированию промышленных роботов необходимо учитывать уровень их способностей; модульное исполнение обеспечивает быструю разборку и сборку. В процессе обучения ошибочные действия пользователя имеют высокую допустимую погрешность на столкновения, низкую вероятность повреждения, а также быструю замену и обслуживание.
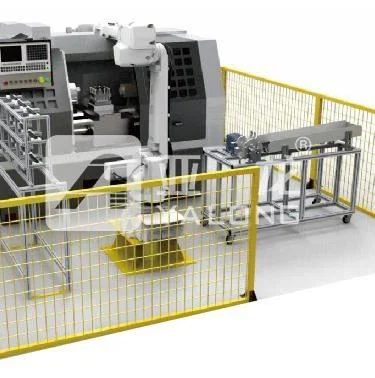
Открытость и гибкость:
Сценарии применения промышленных роботов состоят из различных функциональных модулей. Обучающиеся могут комбинировать модули в соответствии со своими потребностями, создавая собственные сценарии применения и рабочие процессы промышленных роботов. Также возможно сращивание двух столов для изучения более сложных навыков применения промышленных роботов. Пользователи могут самостоятельно разрабатывать новые учебные модули, обогащать тренировочные проекты и обновлять учебное содержание в соответствии со сценариями применения промышленных роботов на реальных предприятиях.
Поддержка виртуального моделирования:
Учитывая большие инвестиции в учебное оборудование в профессиональных колледжах и нехватку комплектов, комплекс оснащён программным обеспечением для виртуального моделирования. Движения промышленного робота можно непосредственно управлять в программном обеспечении симулятора. В то же время промышленный робот может в реальном времени передавать своё собственное положение и ориентацию и воспроизводить их в реальном времени в виде трёхмерной модели в программном обеспечении симулятора. Кроме того, программное обеспечение виртуального моделирования включает функцию офлайн-моделирования, и пользователи могут использовать офлайн-программу для управления движением промышленного робота.
Интеграция с оценочной системой:
Платформа использует идентификацию пользователя по отпечатку пальца для включения и выключения питания. После успешной верификации сервер выводит информацию о пользователе и отображает её на сенсорном экране человек-машина, а также генерирует двумерный штрих-код для оценки и аттестации.
Оценочная система может управлять и отображать такую информацию, как онлайн-регистрация, содержание проекта, критерии оценки, управление преподавателями и управление учащимися. После регистрации пользователя может быть реализовано распределение по сессиям, а после завершения оценки баллы автоматически загружаются на сервер для статистики и хранения.