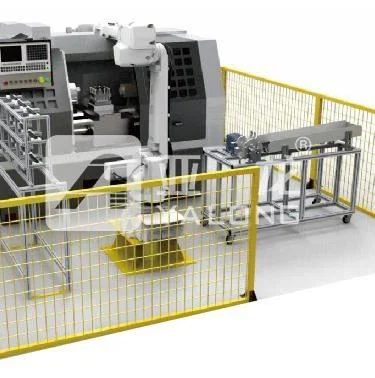
Учебная система для роботизированной паллетирования YL-1357A в основном состоит из промышленного робота, паллетируемых материалов, захватов для паллетирования, U-образного конвейерной ленты и других частей. Пользователи могут изучать и исследовать решения по паллетированию с помощью промышленного робота и программирование, изменяя пространственное положение. В блоке паллетирования пользователи могут изучать и использовать программные функции и команды для выполнения реальных задач паллетирования путём регулярной обработки и штабелирования материалов.
Особенности оборудования:
- Робот
Используется шестиосевой робот отечественного известного бренда Guangshu, с приводом от серводвигателя переменного тока, грузоподъёмностью ≥20 кг, рабочим радиусом ≥1500 мм, повторяемой точностью позиционирования ≤±0,05 мм, вес корпуса робота: ≥240 кг.
Диапазон движения и скорость каждого сочленения робота:
Пульт обучения программированию поставляется в комплекте с роботом, использует большой цветной экран с отображением на китайском языке; рабочая траектория может быть обучена (запрограммирована методом обучения).
- Захват
Захват робота обладает широкой адаптируемостью к заготовке, использует функцию двухстороннего захвата для обеспечения точного зажима и быстрой замены таких заготовок, как материалоблочные элементы.
Используются пневматические компоненты известного бренда SMC.
Усилие захвата ≥5 кг, рабочее давление воздуха 0,5-0,7 МПа.
Вспомогательное оборудование: бункеры для сырья и готовой продукции, имитационное оборудование для токарной обработки.